Smart PickPoint Calculation
Berechnet den idealen Aufgreifpunkt (Pick Point) für den Roboter.
-
Bauteilerkennung
-
Berechnen des Aufgreifpunktes
-
Speichern der Daten
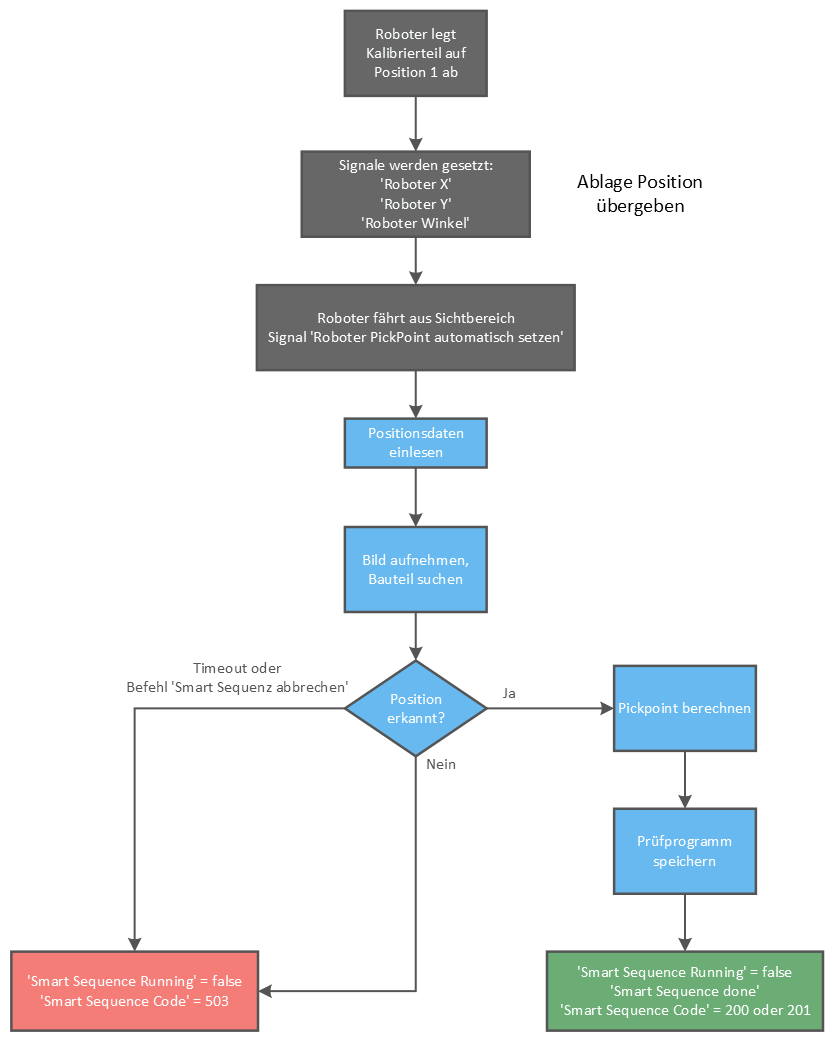
Funktionsprinzip
Diese Sequenz besteht aus mehreren Schritten:
-
Roboter legt das Bauteil im Erkennungsbereich ab
-
Ablage Koordinaten werden über Schnittstelle übergeben
-
Bauteil wird mit Kamera erkannt
-
Berechnen des Aufgreifpunktes mittel Kamera- und Roboter-Koordinaten